Robert Brik
Mechanical/Design Engineer
Soft Pneumatic Gripper with Synthetic Fibrillar Adhesive
Overview
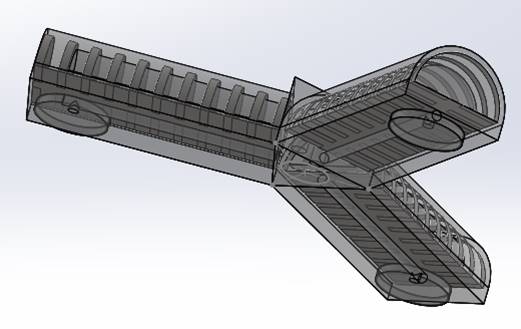
- The proposed gripper combined principles from the Suzumori and Pneu-net actuators to create fingers that flex and grip.
- A hand was designed with three identical fingers, one of which was prototyped.
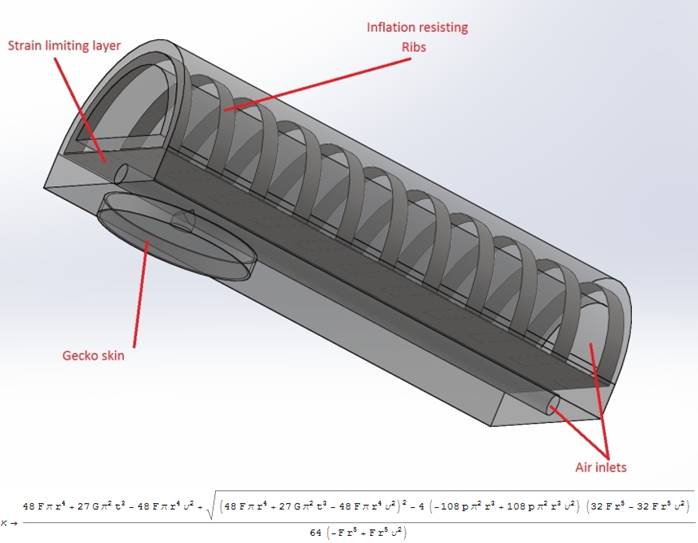
- Each finger is made of an air chamber that is encompassed by ribs sitting on a strain limiting layer. The intent is to allows the finger to bend when air pressure is applied without the need to balloon significantly outward.
- The tip of each finger has a piece of fibrillar adhesive attached in order to allow for better manipulation of flat objects.
CAD & Modeling
- The design was drawn in Solidworks and the movement was modeled with the assistance of Matlab.
- A number of assumptions were made in order to create an estimate for the bending curvature:
- Strain only occurs along the axis due to radial strain limiting bands.
- The air chamber behaves in a Neo-Hookean fashion.
- The strain limiting layer does not stretch due to its thickness and resilience.
- As a result, a mathematical model was created to predict the deformation of the gripper at a given pressure.
Fabrication
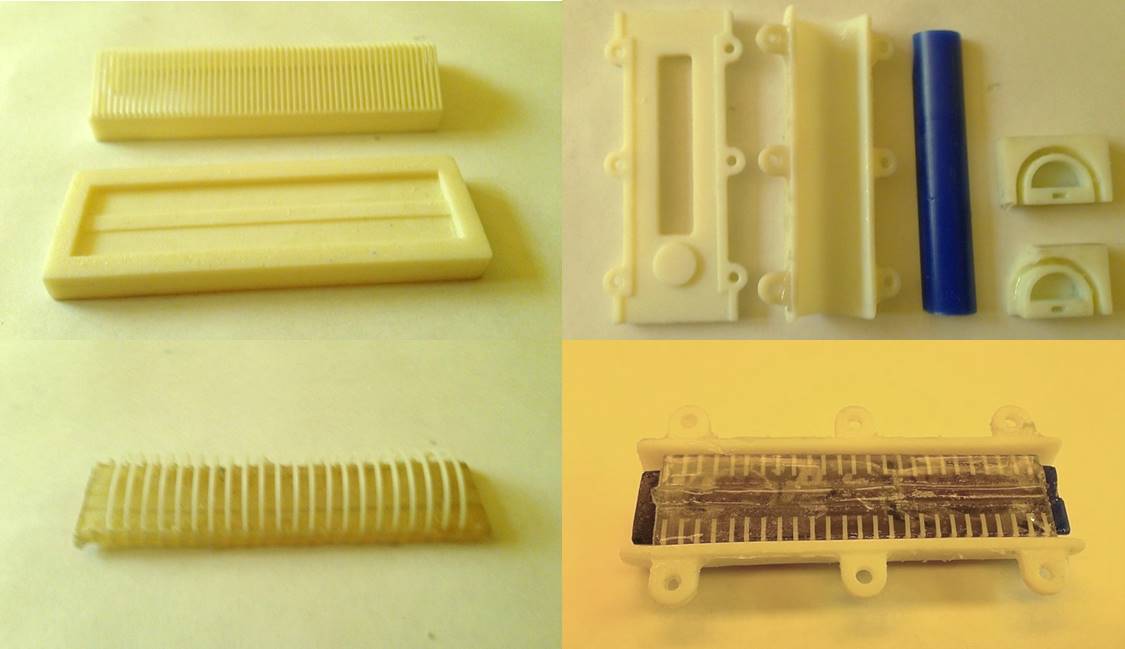
- A multi-step fabrication method was developed to make each finger.
- The strain layer was created by pouring ST-1060 Polyurethane into the base of a 3D-printed mold. Prior to the polyurethane fully curing, a comb like mold was used to insert 3D printed ribs into the rubber. The resulting strain limiting layer was highly resistant to strain along its axis, but easily bendable.
- The strain layer was then inserted into a second 3D-printed ABS mold along with internal wax extrusions to form the air channels. F-25 polyurethane was poured to form the layer around the ribs and finally the tip of the finger was dipped in polyurethane to form an end-cap and seal the channels.
- The completed finger was attached to a triangular base that included channels to supply air to the chambers.
Results & Conclusion
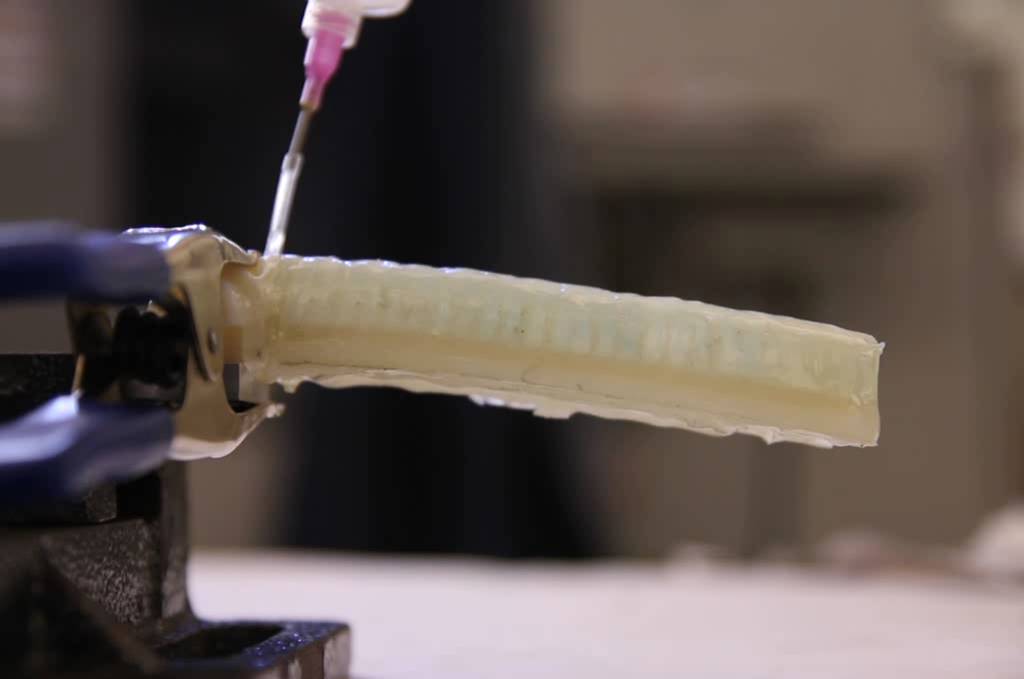
- Overall, when air pressure was applied, the finger bent successfully along the predicted axis without ballooning outward.
- During initial testing, the finger could adapt to 3D geometry
- Some leaks and bonding issues were found which necessitated a post-mold coating of polyurethane.
- In the future, it would be interesting to include multiple air chambers in each finger or make the strain limiting layer non-homogenous.